


















































 首页
首页

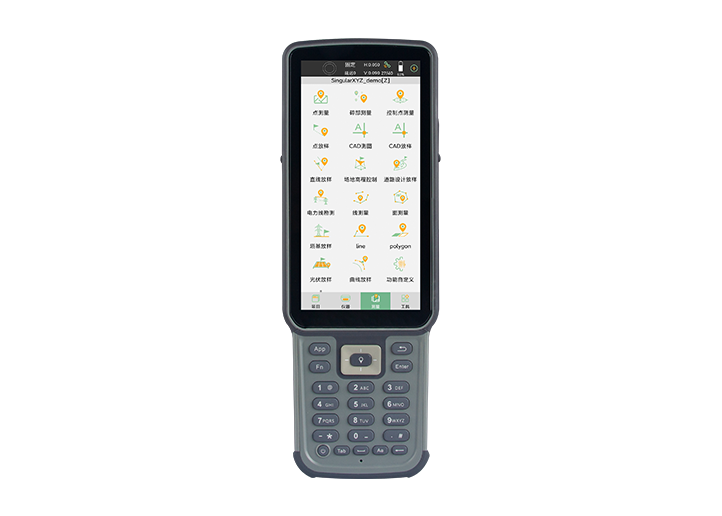
SV100 INS-D
组合导航接收机
组合导航接收机
了解更多























 2025-06-16
2025-06-16
 Chloe
Chloe
为验证 SV100 系列惯性导航系统(INS)接收机在各类全球导航卫星系统(GNSS)信号受挑战环境中的实际性能,星舆科技(SingularXYZ)在多样的城市及半封闭场景中开展了一项结构化动态车载测试。该测试重点评估了 GNSS 信号中断时的定位精度、姿态稳定性及系统鲁棒性。
本次实地测试旨在评估 SV100 系列惯性导航系统(INS)在自动驾驶、测绘车辆、智能交通及类似应用的典型运行环境下的性能。核心目标包括:
验证在开阔及半遮挡城市区域的定位精度
评估在高架道路及部分有遮挡道路中的航向稳定性与轨迹偏差
测试在 GNSS 信号完全丢失场景(如隧道、地下车库)下的导航连续性
测试中同步对SV100系列惯性导航系统(INS)的三台设备进行了测试:
| 编号 | 设备 | 定位解决方案 | 输出频率 |
| 1 | SV100 INS-1 (标准版) | RTK + 航位推算 | 10 Hz |
| 2 | SV100 INS-2 (备用机) | RTK + 航位推算 | 10 Hz |
| 3 | SV100 INS-WI (配备轮速输入增强功能) | RTK + 航位推算 + 轮速 | 10 Hz |
1. 测试方法
按照标准安装要求,SV100 系列惯性导航系统(INS)设备与一套参考系统一同安装在测试车辆上。整个驾驶测试时长超过 3 小时,每个典型场景的测试时间约为 10 分钟。数据采集完成后,通过与高精度参考系统的后处理结果进行对比,对 SV100 系列惯性导航系统的定位性能展开评估。
2. 测试路线和场景
此次驾驶测试路线涵盖了上海市内多种具有代表性的全球导航卫星系统(GNSS)环境,包括:
开阔的高速公路环境
城市峡谷及密集居民区
高架道路和立交桥
隧道与地下停车场(未在路线图中显示)
选择这些环境中的每一种,都是为了考验全球导航卫星系统(GNSS)信号的可用性,并评估SV100惯性导航系统(INS)在典型实际场景下的性能。

所有定位结果将在以下章节中通过相应的可视化图表进行说明。
所用关键精度指标说明
| 指标 | 定义 | 解释 | 典型用例 |
RMS | 所有位置误差的均方根 | 平均误差大小 | 整体系统稳定性评估 |
CEP68 | 包含68%位置点的半径 | 68%的误差落在该距离范围内 | 正常条件下的精度估计 |
CEP95 | 包含95%位置点的半径 | 95%的误差落在该距离范围内 | 复杂环境下的可靠性评估 |
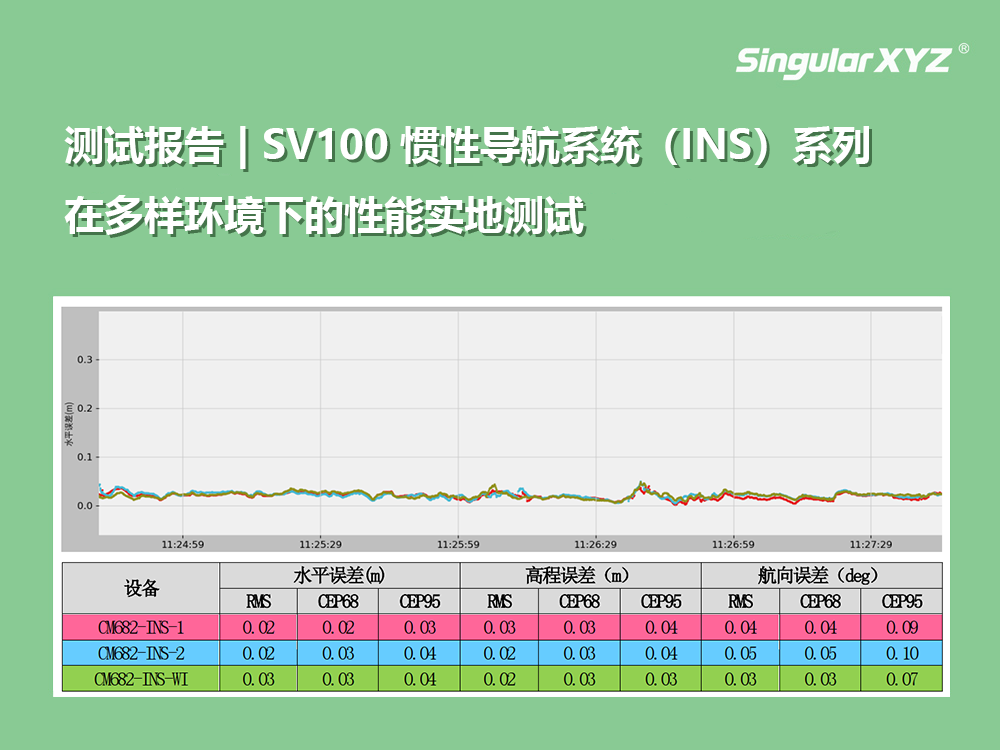
① 开阔以及半遮挡环境:(南浦大桥、居民区)
这些区域能提供稳定的全球导航卫星系统(GNSS)信号覆盖,但存在部分建筑物遮挡的情况。

② 高架道路路段:(外环线快速路及东龙高架路)
外环线(开阔的高速公路,偶有立交桥)
东龙高架路(带有连续的地下通道)


③ 全球导航卫星系统(GNSS)信号中断场景:(人民隧道、地下停车场)
这些是完全无全球导航卫星系统(GNSS)信号的环境,每个路段的信号中断时长超过 60 秒。



在开阔或轻度遮挡的城市区域,实现了厘米级精度。
在高架桥下或高架道路场景中,保持了厘米至分米级精度。
在全球导航卫星系统(GNSS)信号完全丢失 60 秒时,仍能维持约 1 米的精度;信号丢失 120 秒时,精度为 2 米左右。
轮速输入在长时间信号中断期间,对抑制漂移有显著提升作用。
SV100 惯性导航系统(INS)系列在实际场景中展现出卓越的定位性能,尤其在全球导航卫星系统(GNSS)信号断续或完全缺失的情况下表现突出。其紧耦合融合算法、高频输出能力,以及对轮速等辅助传感器的支持,使其成为自动驾驶系统、车辆导航、移动测绘和智能基础设施应用领域中一款稳健且适应性强的解决方案。
![]()
![]()